MAGNABEND - שיקולי עיצוב בסיסיים
עיצוב מגנט בסיסי
מכונת Magnabend מתוכננת כמגנט DC חזק עם מחזור עבודה מוגבל.
המכונה מורכבת מ-3 חלקים בסיסיים:-
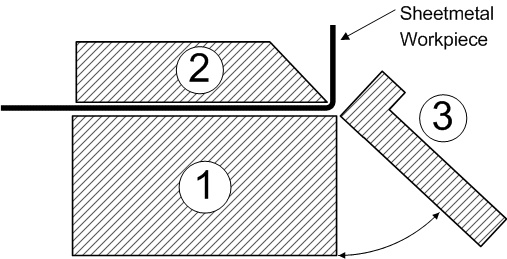
גוף המגנט המהווה את בסיס המכונה ומכיל את סליל האלקטרו-מגנט.
סרגל ההידוק המספק נתיב לשטף מגנטי בין הקטבים של בסיס המגנט, ובכך מהדק את חומר העבודה ממתכת.
קרן הכיפוף אשר מסובבת לקצה הקדמי של גוף המגנט ומספקת אמצעי להפעלת כוח כיפוף על חומר העבודה.
תצורות מגנט-גוף
תצורות שונות אפשריות לגוף המגנט.
הנה 2 ששניהם שימשו עבור מכונות Magnabend:
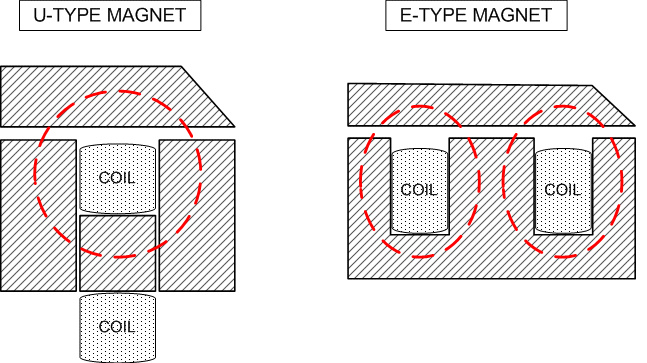
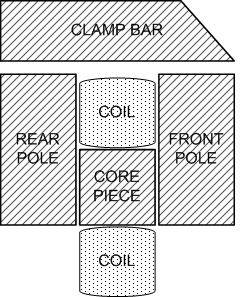
הקווים האדומים המקווקוים בציורים למעלה מייצגים את נתיבי השטף המגנטי.שים לב שלעיצוב "U-Type" יש מסלול שטף יחיד (זוג עמודים אחד) ואילו לעיצוב "E-Type" יש 2 מסלולי שטף (2 זוגות מוטות).
השוואת תצורת מגנט:
התצורה מסוג E יעילה יותר מהתצורה מסוג U.
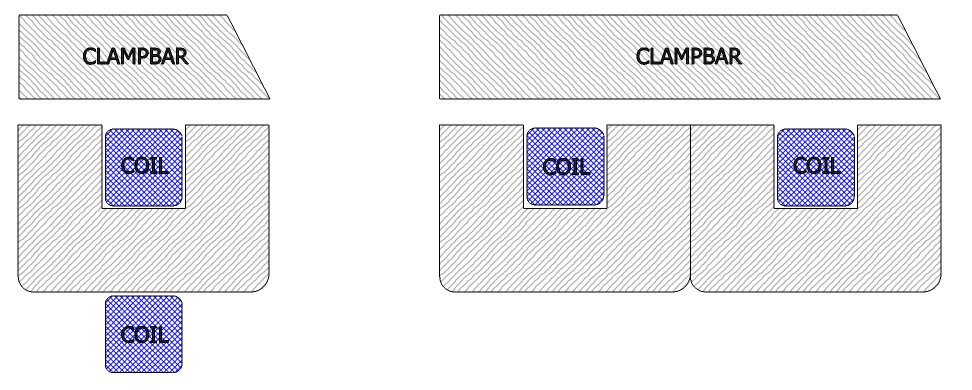
כדי להבין מדוע זה כך שקול את שני הרישומים שלהלן.
משמאל חתך של מגנט מסוג U ומימין מגנט מסוג E שנוצר בשילוב 2 מאותם סוגי U.אם כל תצורת מגנט מונעת על ידי סליל עם אותן סיבובי אמפר אז ברור שלמגנט הכפול (סוג E) יהיה כוח הידוק פי שניים.הוא גם משתמש בכמות כפולה של פלדה אבל כמעט לא חוט נוסף לסליל!(בהנחה של עיצוב סליל ארוך).
(הכמות הקטנה של החוט הנוסף תהיה נחוצה רק בגלל ששתי שתי הרגליים של הסליל מרוחקות יותר זו מזו בעיצוב "E", אך התוספת הזו הופכת לחסרת חשיבות בעיצוב סליל ארוך כמו המשמש ל- Magnabend).
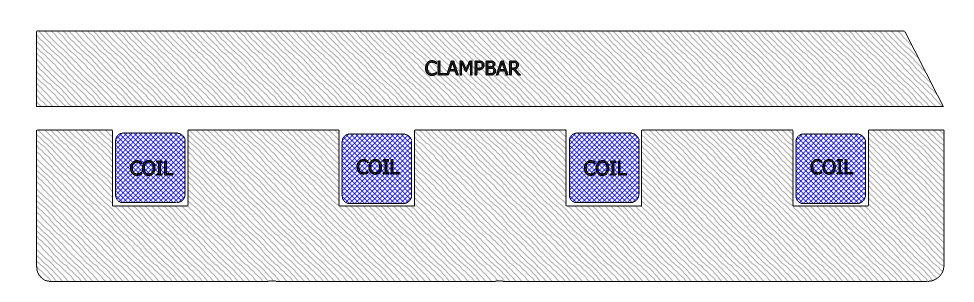
סופר מגנבנד:
כדי לבנות מגנט חזק עוד יותר, ניתן להרחיב את תפיסת ה-E, כגון תצורת E הכפולה הזו:
דגם תלת מימד:
להלן ציור תלת מימדי המציג את הסידור הבסיסי של חלקים במגנט מסוג U:
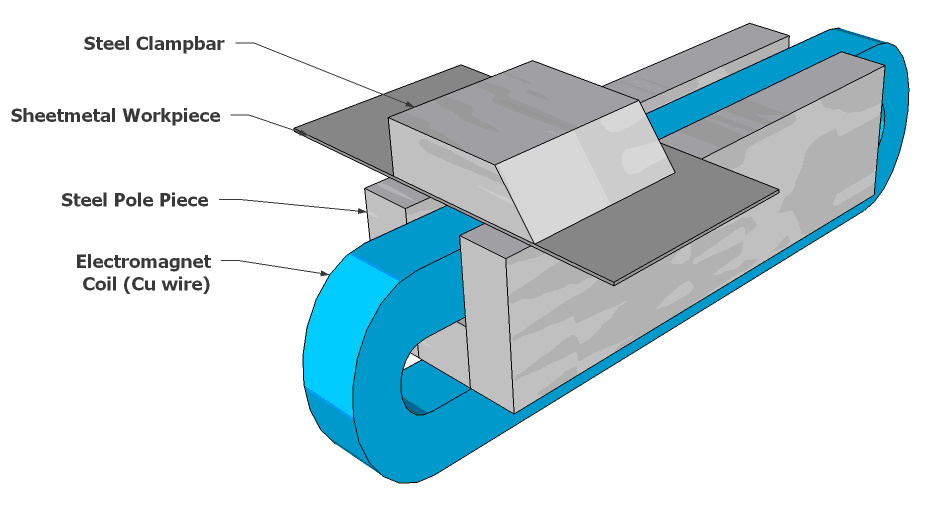
בעיצוב זה המוטות הקדמיים והאחוריים הם חלקים נפרדים ומוצמדים על ידי ברגים לחלק הליבה.
למרות שבאופן עקרוני, ניתן יהיה לעבד גוף מגנט מסוג U מחתיכת פלדה בודדת, אז לא ניתן יהיה להתקין את הסליל ולכן יהיה צורך ללפף את הסליל במקום (על גוף המגנט המעובד ).
במצב ייצור רצוי מאוד להיות מסוגל לסובב את הסלילים בנפרד (על פורמן מיוחד).לפיכך עיצוב מסוג U מכתיב למעשה בנייה מפוברקת.
מצד שני, העיצוב מסוג E מתאים את עצמו היטב לגוף מגנט המיוצר מחתיכת פלדה אחת מכיוון שניתן להתקין סליל מוכן מראש בקלות לאחר עיבוד גוף המגנט.גוף מגנט מחלק אחד מתפקד טוב יותר מבחינה מגנטית מכיוון שאין לו פערי בנייה שאחרת היו מפחיתים מעט את השטף המגנטי (ומכאן את כוח ההידוק).
(רוב Magnabends שיוצרו לאחר 1990 השתמשו בעיצוב מסוג E).
בחירת חומר לבניית מגנטים
גוף המגנט ומוט המהדק חייבים להיות עשויים מחומר פרומגנטי (ניתן למגנט).פלדה היא ללא ספק החומר הפרומגנטי הזול ביותר והיא הבחירה המתבקשת.עם זאת, ישנן פלדות מיוחדות שונות שעשויות להיחשב.
1) פלדת סיליקון: פלדה בעלת התנגדות גבוהה אשר זמינה בדרך כלל בלמינציות דקות ומשמשת בשנאי AC, מגנטים AC, ממסרים וכו'. התכונות שלה אינן נדרשות עבור Magnabend שהוא מגנט DC.
2) ברזל רך: חומר זה יפגין מגנטיות שיורית נמוכה יותר שתהיה טובה עבור מכונת Magnabend, אך היא רך פיזית, מה שאומר שהוא ייפגע בקלות וייפגע בקלות;עדיף לפתור את בעיית המגנטיות השיורית בדרך אחרת.
3) ברזל יצוק: לא מתמגנט בקלות כמו פלדה מגולגלת אבל יכול להיחשב.
4) נירוסטה מסוג 416: לא ניתן למגנט חזק כמו פלדה והיא יקרה הרבה יותר (אך עשויה להיות שימושית למשטח מכסה מגן דק על גוף המגנט).
5) נירוסטה מסוג 316: זוהי סגסוגת פלדה לא מגנטית ולכן אינה מתאימה כלל (למעט כמו ב-4 לעיל).
6) פלדת פחמן בינונית, סוג K1045 : חומר זה מתאים במיוחד לבניית המגנט, (וחלקים אחרים של המכונה).זה קשה למדי במצב כפי שסופק והוא גם מתאמן היטב.
7) פלדת פחמן בינונית מסוג CS1020: פלדה זו לא ממש קשה כמו K1045 אבל היא זמינה יותר ולכן עשויה להיות הבחירה המעשית ביותר לבניית מכונת Magnabend.
שימו לב שהמאפיינים החשובים הנדרשים הם:
מגנטיזציה רוויה גבוהה.(רוב סגסוגות הפלדה רוויות בסביבות 2 טסלה),
זמינות של גדלי מקטעים שימושיים,
עמידות בפני נזק מקרי,
יכולת עיבוד, ו
עלות סבירה.
פלדת פחמן בינונית מתאימה היטב לכל הדרישות הללו.ניתן להשתמש גם בפלדה דלת פחמן, אך היא פחות עמידה בפני נזקים מקריים.קיימות גם סגסוגות מיוחדות אחרות, כגון סופרמנדר, בעלות מגנטיות רוויה גבוהה יותר, אך אין להתייחס אליהן בגלל העלות הגבוהה מאוד שלהן בהשוואה לפלדה.
עם זאת, פלדת פחמן בינונית מפגינה מגנטיות שיורית מסוימת שמספיקה כדי להוות מטרד.(ראה סעיף על מגנטיות שיורית).
הסליל
הסליל הוא זה שמניע את השטף הממגנט דרך האלקטרומגנט.כוח המגנט שלו הוא רק מכפלה של מספר הסיבובים (N) וזרם הסליל (I).לכן:

N = מספר סיבובים
I = זרם בפיתולים.
הופעת "N" בנוסחה לעיל מובילה לתפיסה שגויה נפוצה.
ההנחה הרווחת היא שהגדלת מספר הסיבובים תגביר את כוח המגנטיזציה אך בדרך כלל זה לא קורה מכיוון שסיבובים נוספים גם מפחיתים את הזרם, I.
שקול סליל המסופק עם מתח DC קבוע.אם מספר הסיבובים יוכפל אז גם ההתנגדות של הפיתולים תוכפל (בסליל ארוך) וכך הזרם יקטן בחצי.ההשפעה נטו אינה עלייה ב-NI.
מה שבאמת קובע את NI הוא ההתנגדות לכל סיבוב.לפיכך כדי להגדיל את NI יש להגדיל את עובי החוט.הערך של סיבובים נוספים הוא שהם אכן מפחיתים את הזרם ולכן את פיזור ההספק בסליל.
המעצב צריך להיות מודע לכך שמד החוט הוא מה שבאמת קובע את כוח המגנט של הסליל.זהו הפרמטר החשוב ביותר של עיצוב סליל.
מוצר NI מכונה לעתים קרובות "סיבובי אמפר" של הסליל.
כמה סיבובים באמפר צריך?
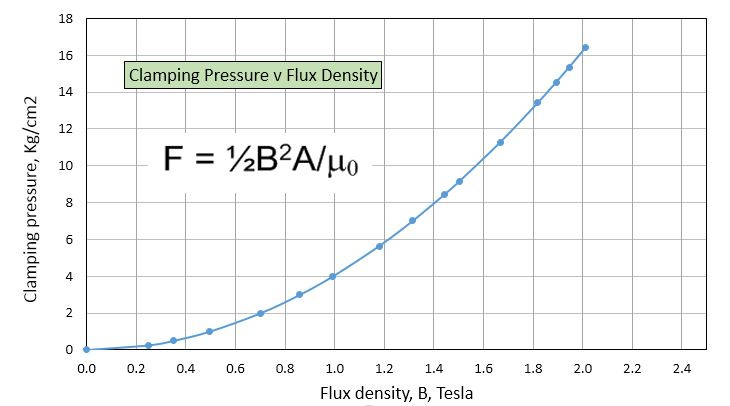
פלדה מציגה מגנטיזציה של רוויה של בערך 2 טסלה וזה מגדיר גבול בסיסי לכמה כוח ההידוק ניתן להשיג.
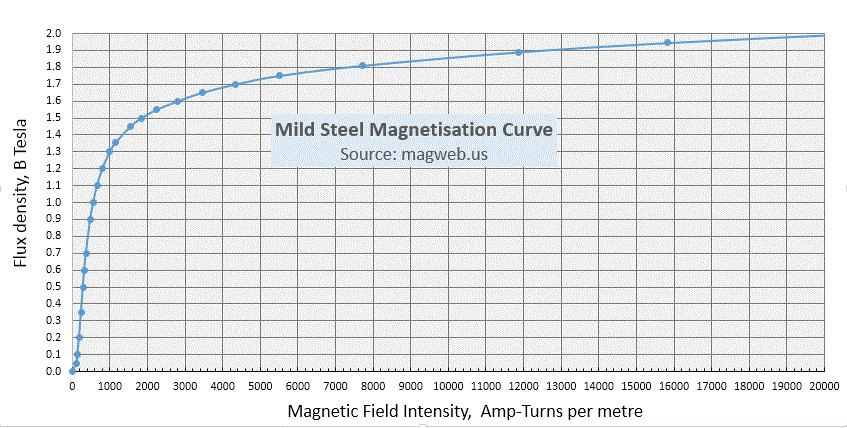
מהגרף לעיל אנו רואים שעוצמת השדה הנדרשת כדי לקבל צפיפות שטף של 2 טסלה היא כ-20,000 סיבובי אמפר למטר.
כעת, עבור עיצוב Magnabend טיפוסי, אורך נתיב השטף בפלדה הוא בערך 1/5 מטר ולכן ידרוש (20,000/5) AT כדי לייצר רוויה, כלומר כ-4,000 AT.
זה יהיה נחמד לקבל הרבה יותר סיבובי אמפר מזה כדי שניתן יהיה לשמור על מגנטיות רוויה גם כאשר מכניסים למעגל המגנטי פערים לא מגנטיים (כלומר חלקי עבודה לא ברזליים).עם זאת ניתן להשיג סיבובי אמפר נוספים רק בעלות ניכרת של פיזור הספק או עלות חוטי נחושת, או שניהם.לכן דרושה פשרה.
לעיצובים טיפוסיים של Magnabend יש סליל שמייצר סיבובים של 3,800 אמפר.
שימו לב שנתון זה אינו תלוי באורך המכונה.אם אותו עיצוב מגנטי מיושם על טווח של אורכי מכונות, זה מכתיב שלמכונות הארוכות יותר יהיו פחות סיבובים של חוט עבה יותר.הם ימשכו יותר זרם כולל אבל יהיה אותו מכפלה של אמפר x סיבובים ויהיה להם אותו כוח הידוק (ואותו פיזור הספק) ליחידת אורך.
מחזור חובה
הרעיון של מחזור עבודה הוא היבט חשוב מאוד בעיצוב האלקטרומגנט.אם התכנון מספק יותר מחזור עבודה ממה שצריך אז זה לא אופטימלי.מחזור עבודה רב יותר פירושו מטבעו שיהיה צורך ביותר חוטי נחושת (כתוצאה מכך עלות גבוהה יותר) ו/או יהיה פחות כוח הידוק זמין.
הערה: למגנט מחזור עבודה גבוה יותר יהיה פיזור הספק פחות, מה שאומר שהוא יצרוך פחות אנרגיה ובכך יהיה זול יותר לתפעול.עם זאת, מכיוון שהמגנט פועל לתקופות קצרות בלבד, עלות האנרגיה של הפעולה נחשבת בדרך כלל כבעלת משמעות קטנה מאוד.לפיכך, גישת התכנון היא שתהיה פיזור כוח רב ככל שתוכל להתחמק ממנו מבחינת אי חימום יתר של פיתולי הסליל.(גישה זו משותפת לרוב תכנוני האלקטרומגנטים).
המגנבנד מיועד למחזור עבודה נומינלי של כ-25%.
בדרך כלל זה לוקח רק 2 או 3 שניות לבצע עיקול.לאחר מכן, המגנט יהיה כבוי למשך 8 עד 10 שניות נוספות בזמן שחומר העבודה מועבר ומיושר מוכן לעיקול הבא.אם חריגה ממחזור העבודה של 25%, בסופו של דבר המגנט יתחמם מדי ועומס יתר תרמי ייכשל.המגנט לא ייפגע אך יהיה צורך לתת לו להתקרר כ-30 דקות לפני שיופעל שוב.
ניסיון תפעולי עם מכונות בשטח הראה שמחזור העבודה של 25% מתאים למדי למשתמשים טיפוסיים.למעשה, חלק מהמשתמשים ביקשו גרסאות אופציונליות להספק גבוה של המכונה בעלות כוח הידוק רב יותר על חשבון פחות מחזור עבודה.
שטח חתך סליל
שטח החתך הזמין עבור הסליל יקבע את הכמות המקסימלית של חוטי נחושת שניתן להתאים אליו. השטח הזמין לא צריך להיות יותר מהנדרש, בהתאם לסיבובי האמפר הנדרשים ולפיזור ההספק.מתן יותר מקום לסליל יגדיל בהכרח את גודל המגנט ויביא לאורך נתיב שטף ארוך יותר בפלדה (מה שיפחית את השטף הכולל).
אותו טיעון מרמז כי כל שטח סליל מסופק בעיצוב הוא תמיד צריך להיות מלא בחוטי נחושת.אם הוא לא מלא אז זה אומר שגיאומטריית המגנט הייתה יכולה להיות טובה יותר.
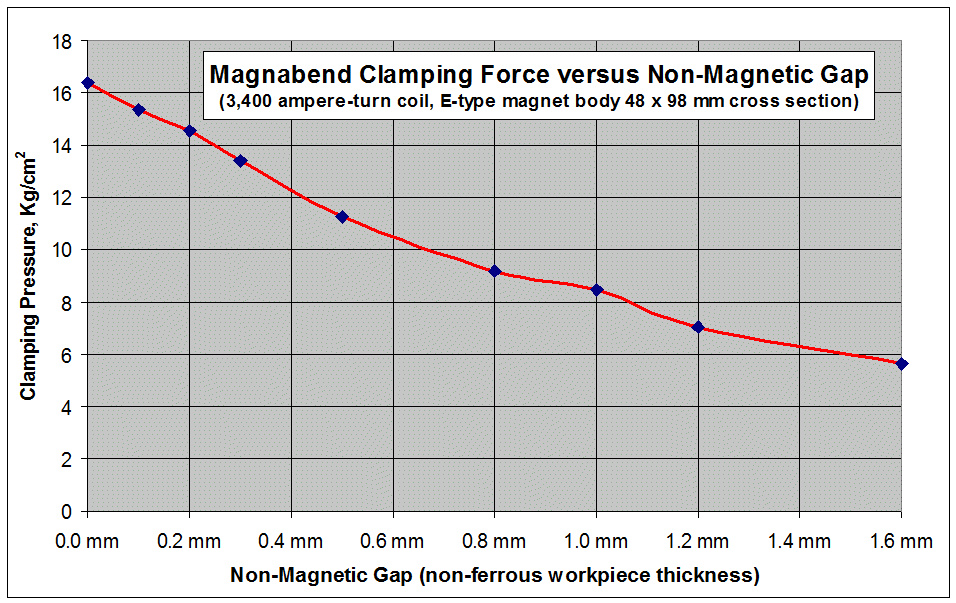
כוח הידוק Magnabend:
הגרף שלהלן התקבל על ידי מדידות ניסוי, אבל הוא מתאים למדי עם חישובים תיאורטיים.
את כוח ההידוק ניתן לחשב מתמטית מנוסחה זו:
F = כוח בניוטון
B = צפיפות השטף המגנטי בטסלות
A = שטח הקטבים ב-m2
µ0 = קבוע חדירות מגנטית, (4π x 10-7)
לדוגמא, נחשב את כוח ההידוק עבור צפיפות השטף של 2 טסלה:
לפיכך F = ½ (2)2 A/µ0
עבור כוח על יחידת שטח (לחץ) נוכל להוריד את ה"A" בנוסחה.
לפיכך לחץ = 2/µ0 = 2/(4π x 10-7) N/m2.
זה יוצא ל-1,590,000 N/m2.
כדי להמיר את זה לכוח קילוגרמים ניתן לחלק אותו ב-g (9.81).
כך: לחץ = 162,080 ק"ג/מ"ר = 16.2 ק"ג/סמ"ר.
זה מתאים למדי עם הכוח הנמדד עבור פער אפס המוצג בגרף לעיל.
ניתן להמיר נתון זה בקלות לכוח הידוק כולל עבור מכונה נתונה על ידי הכפלתו בשטח המוט של המכונה.עבור דגם 1250E שטח המוט הוא 125(1.4+3.0+1.5) =735 סמ"ר.
לפיכך, הכוח הכולל, אפס-פער, יהיה (735 x 16.2) = 11,900 ק"ג או 11.9 טון;כ-9.5 טון למטר אורך מגנט.
צפיפות השטף ולחץ ההידוק קשורים ישירות והם מוצגים בתרשים להלן:
כוח הידוק מעשי:
בפועל כוח הידוק גבוה זה מתממש רק כאשר אין בו צורך(!), כלומר כאשר מכופפים חלקי עבודה פלדה דקים.כאשר מכופפים חלקי עבודה לא ברזליים הכוח יהיה קטן יותר כפי שמוצג בגרף למעלה, ו(קצת מוזר), הוא גם פחות כאשר מכופפים חלקי עבודה מפלדה עבה.הסיבה לכך היא שכוח ההידוק הדרוש לביצוע עיקול חד גבוה בהרבה מזה הדרוש לכיפוף רדיוס.אז מה שקורה הוא שככל שהעיקול מתקדם, הקצה הקדמי של מוט המהדק מתרומם מעט ובכך מאפשר לחומר העבודה ליצור רדיוס.
מרווח האוויר הקטן שנוצר גורם לאובדן קל של כוח ההידוק אך הכוח הדרוש ליצירת עיקול הרדיוס ירד בצורה חדה יותר מאשר כוח ההידוק של המגנט.כך נוצר מצב יציב ומוט המהדק אינו מרפה.
מה שתואר לעיל הוא אופן הכיפוף כאשר המכונה קרובה לגבול העובי שלה.אם תנסה חומר עבה עוד יותר, כמובן שהמוט יתרומם.
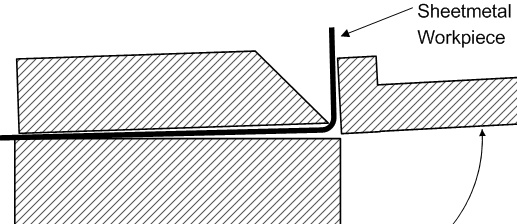
תרשים זה מצביע על כך שאם קצה האף של המוט היה ברדיוס מעט, ולא חד, אז מרווח האוויר לכיפוף עבה היה מצטמצם.
אכן זה המקרה ולמגנבנד עשוי כהלכה יהיה מוט מהדק עם קצה רדיוס.(קצה עם רדיוס גם נוטה הרבה פחות לנזק מקרי בהשוואה לקצה חד).
מצב שולי של כשל בכיפוף:
אם מנסים לכופף חומר עבה מאוד, המכונה לא תצליח לכופף אותו מכיוון שהמוט פשוט יתרומם.(למרבה המזל זה לא קורה בצורה דרמטית; מוט המהדק פשוט מרפה בשקט).
עם זאת, אם עומס הכיפוף גדול רק במעט מיכולת הכיפוף של המגנט אז בדרך כלל מה שקורה הוא שהעיקול ימשיך לומר בערך 60 מעלות ואז המוט יתחיל להחליק לאחור.במצב כשל זה המגנט יכול לעמוד בעומס הכיפוף רק בעקיפין על ידי יצירת חיכוך בין חומר העבודה למצע המגנט.
ההבדל בעובי בין כשל עקב הרמה לכשל עקב החלקה הוא בדרך כלל לא גדול.
כשל בהרמה נובע מכך שחומר העבודה מושך את הקצה הקדמי של מוט המהדק כלפי מעלה.כוח ההידוק בקצה הקדמי של המוט הוא בעיקר מה שמתנגד לכך.להידוק בקצה האחורי יש השפעה מועטה מכיוון שהוא קרוב למקום שבו מוט המהדק מסובב.למעשה זהו רק מחצית מכוח ההידוק הכולל אשר מתנגד להרמה.
מצד שני, ההחלקה מתנגדת לכוח ההידוק הכולל אך רק באמצעות חיכוך כך שההתנגדות בפועל תלויה במקדם החיכוך בין חומר העבודה למשטח המגנט.
עבור פלדה נקייה ויבשה, מקדם החיכוך יכול להגיע עד 0.8, אך אם קיימת סיכה אז הוא יכול להיות נמוך עד 0.2.בדרך כלל זה יהיה איפשהו באמצע כך שהמצב השולי של כשל בכפיפה נובע בדרך כלל מהחלקה, אך ניסיונות להגביר את החיכוך על פני המגנט נמצאו כלא כדאיים.
קיבולת עובי:
עבור גוף מגנט מסוג E ברוחב 98 מ"מ ועומק 48 מ"מ ועם סליל סיבוב של 3,800 אמפר, קיבולת הכיפוף באורך מלא היא 1.6 מ"מ.עובי זה חל הן על יריעת פלדה והן על יריעת אלומיניום.תהיה פחות הידוק על יריעת האלומיניום אבל זה דורש פחות מומנט כדי לכופף אותה כך שזה מפצה בצורה כזו שנותן קיבולת מידה דומה לשני סוגי המתכת.
צריכות להיות כמה אזהרות לגבי יכולת הכיפוף המוצהרת: העיקרית שבהן היא שעוצמת התפוקה של הגיליון עשויה להשתנות מאוד.הקיבולת של 1.6 מ"מ חלה על פלדה עם מתח עמידה של עד 250 מגפ"ס ועל אלומיניום עם מתח עמידה של עד 140 מג"פ.
קיבולת העובי בנירוסטה היא כ-1.0 מ"מ.קיבולת זו פחותה משמעותית מאשר לרוב המתכות האחרות, מכיוון שהנירוסטה לרוב אינה מגנטית ועם זאת בעלת מתח תשואה גבוה למדי.
גורם נוסף הוא הטמפרטורה של המגנט.אם אפשרו למגנט להתחמם אז ההתנגדות של הסליל תהיה גבוהה יותר וזה בתורו יגרום לו למשוך פחות זרם עם סיבובי אמפר נמוכים יותר וכוח הידוק נמוך יותר.(השפעה זו היא בדרך כלל די מתונה ולא סביר שתגרום למכונה שלא תעמוד במפרט שלה).
לבסוף, ניתן היה ליצור Magnabends בעל קיבולת עבה יותר אם חתך המגנט היה גדול יותר.